Design and Testing of EndoGrip Aimmed to Reduce Surgeon Nuscle Strain
A gripping tool, EndoGrip, was designed that reduces the squeezing force needed by an endoscopist to prevent slippage while torquing the endoscope. Other features include an increased diameter to aid in applying a moment, as well as an internal spring and finger grips to allow easily repositioning of the device. The device took several iterations of design and user feedback. The final design has several design elements: #1 Interior Grip Angle #2 Interior funnel shape #3 Exterior Taper #4 Straps #5 Interior Springs. This study focuses on the mechanical effects of the grip angle on the slippage of the grip on a mock endoscope.

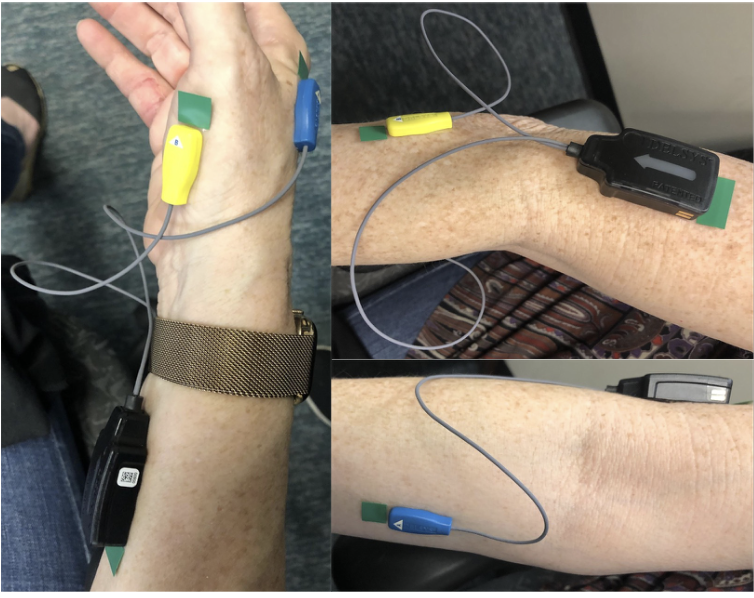
Statically simulated colonoscopy testbed(left) allows for basic motions such as gripping and torquing while collecting EMG data (right).

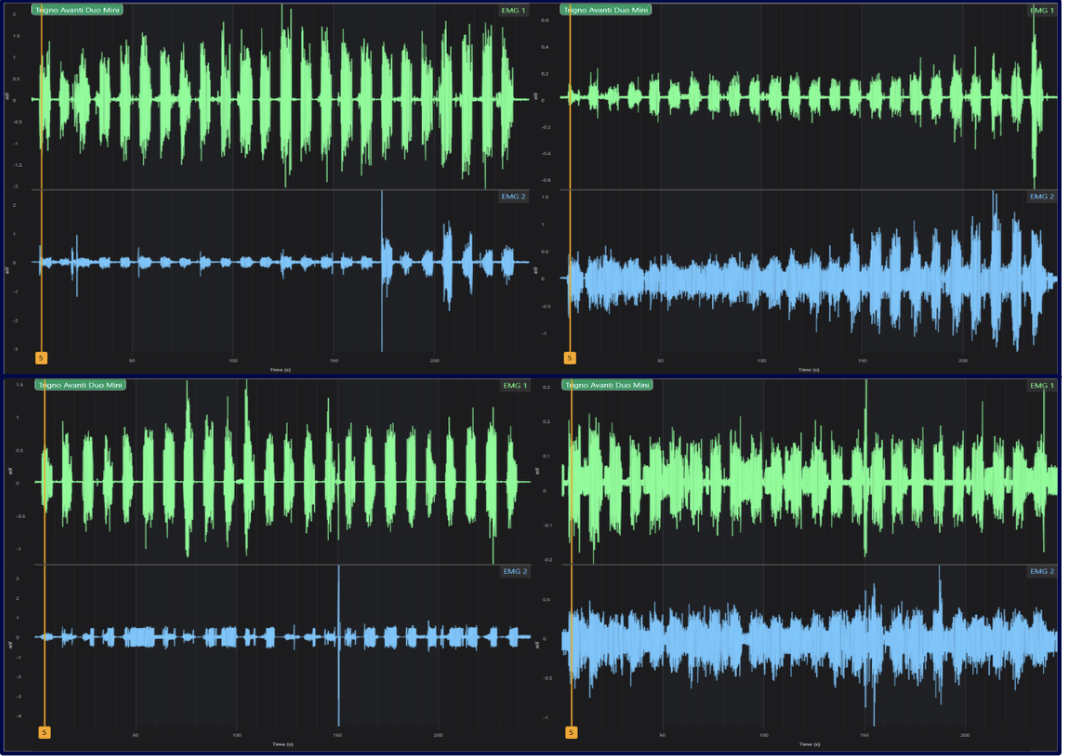
We use surface electromyography (sEMG) sensors to detect the electrical signals innervating muscles with high reports of fatigue and injury while a subject performs a simulated colonoscopy procedure. These signals hold information about the duration of time a muscle is active and the intensity of the muscle activation, which are metrics that can be used to evaluate the level of fatigue and risk of injury in repetitive upper limb localized tasks
Raw EMG signals from FDI (upper left quadrant), APB (lower left quadrant), FCR (upper right quadrant), and ECU (lower right quadrant) during statically simulated colonoscopy using barehand (top) and using our device (bottom).